Autonomous cars
Šimon Rozsíval
Outline
- What is a self driving car
- History
- How does an autonomous car work
- Legal and ethical questions
Levels of Autonomous Vehicles
- National Highway Traffic Safety Administration - 2013
- Level 0 - No-Automation
-
Level 1 – Function-specific Automation
- Parking assistant, cruise control
-
Level 2 - Combined Function Automation
- Adaptive cruise control, lane centering
-
Level 3 - Limited Self-Driving Automation
- No driver needed most of the time
-
Level 4 - Full Self-Driving Automation
- No driver needed at all times
First cars
- 1769 - the first steam-powered automobile
- 1807 - internal combustion engine - hydrogen
- 1864 - gasoline powered combustion engine
- 1886 - first "production" car - several identical copies
- 1888 - first electric car
Automation
- 1921 - invention of automatic transmission
- 1940 - first cars with automatic transmission
-
1986 - Navlab 1 - Carnegie Mellon University
- 36 kph

Automation
- 1921 - invention of automatic transmission
- 1940 - first cars with automatic transmission
-
1986 - Navlab 1 - Carnegie Mellon University
- 36 kph
- ALVINN
- D*
Grand Challenge
- DARPA
- $1 Million prize
- third of military vehicles autonomous by 2015
- 2004 - nobody finished
- 2005 - all but one finished
- 2007 - urban challenge
- avg speed of the #1: 22.53 kph
Google Self-Driving Car Project
- Google works on creating fully autonomous car
- 1.5M miles driven
- car designed from
scratch- sensors first

Other automakers
- Tesla Motors
- Fleet learning => ~100M miles in autonomous mode
- Audi A7 "Jack" - level 3
- Volvo XC90
- BMW iNEXT - 2021
Czech Republic
- Škoda
- line centering, other assistants
- Valeo
- RoboAuto
- academic research
- VUT Brno + Artin
- FEL ČVUT

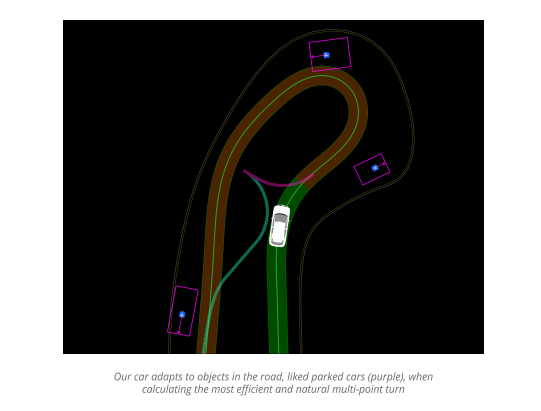
What it takes to build an autonomous car
Path planning
- How to get from point A to point B
- Easy task - many navigation programs in use every day bi millions of drivers
Precision locating
- locate on the map
- position on the road
- current line
- distance from other traffic participants
Maneuvering
- steering the wheels
- pushing the pedals
- changing driving mode
- drive
- reverse
- park
- turning on/off different types of lights
- signaling change of direction
- being visible
- how long to perform each action
- how to combine the actions
Adapting to real world
- even if you plan to go in a certain direction, you are not guaranteed to go there
- malfunction
- incorrect measurements from sensors
- external conditions
- how does the car behave when one of the brakes does not work?
Be allowed to drive
- you cannot drive your AV everywhere
- even for testing
- bureaucracy
- the systems must work well and be durable
Persuade people to use the car
- not everyone trusts AV
- "75% of US drivers"
- "When my personal computer does not work well all the time, how shout I expect the AV to be any different?"
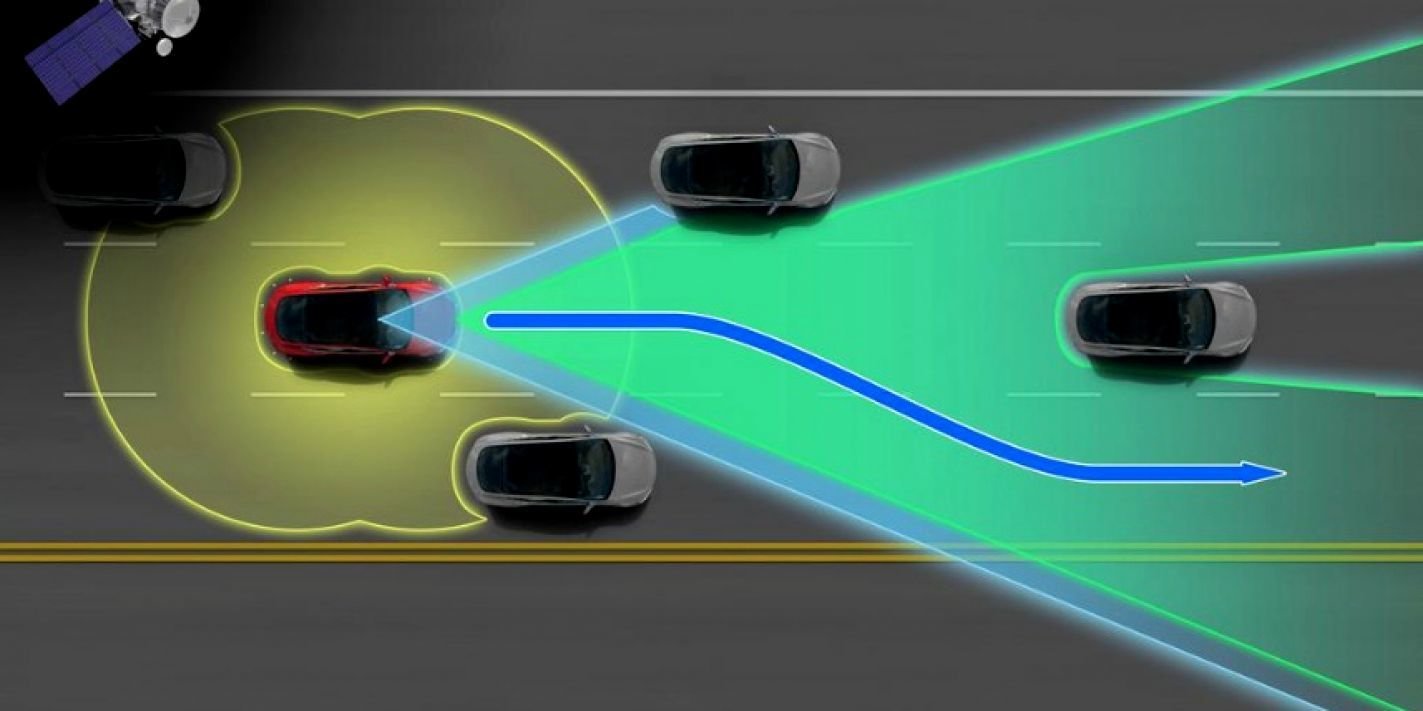
How does the car see the world arround?

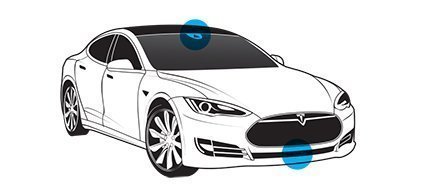
Radar


Lidar
Camera
- detection of traffic signs and traffic lights
- detection of non-moving obstacles
- stereo cameras - distance measurement
- what spectrum does it operate in?
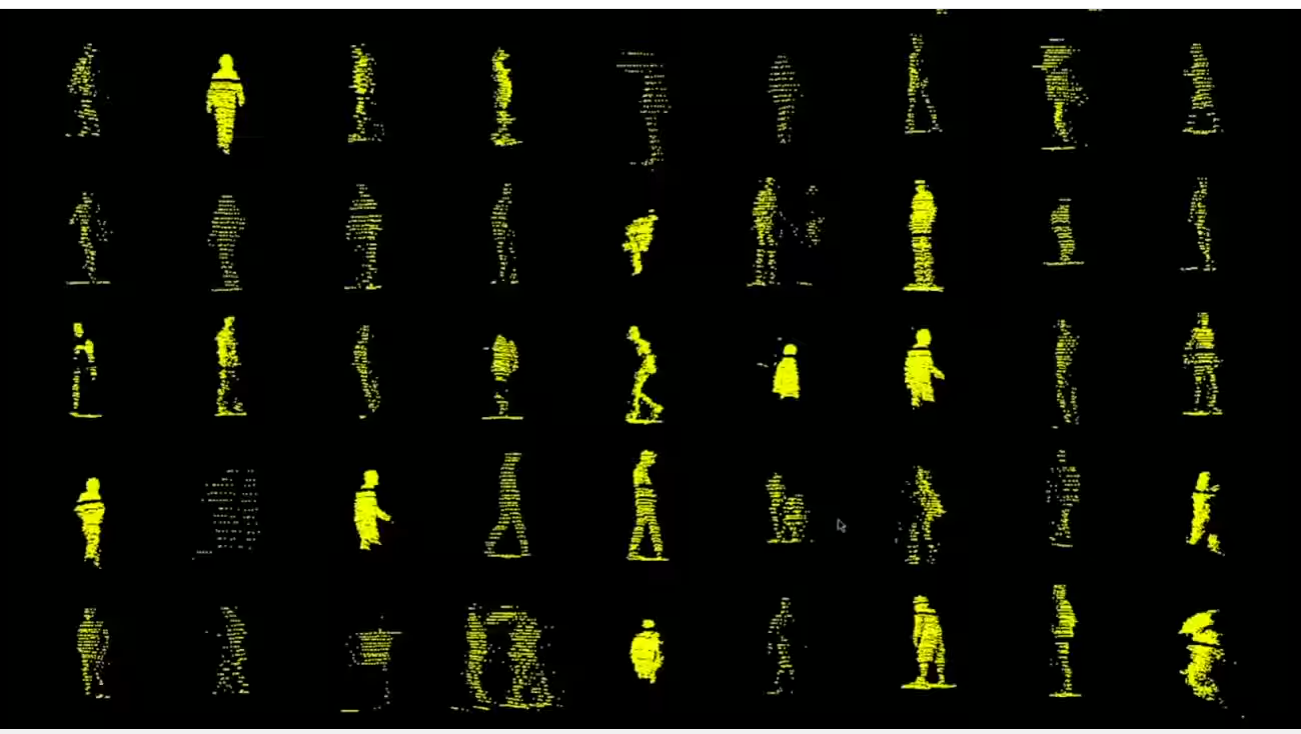
Pattern recognition
- Traffic Sign Recognition (TSR)
- find and classify traffic signs in a photo
- Identify objects based on the partial 3D shape

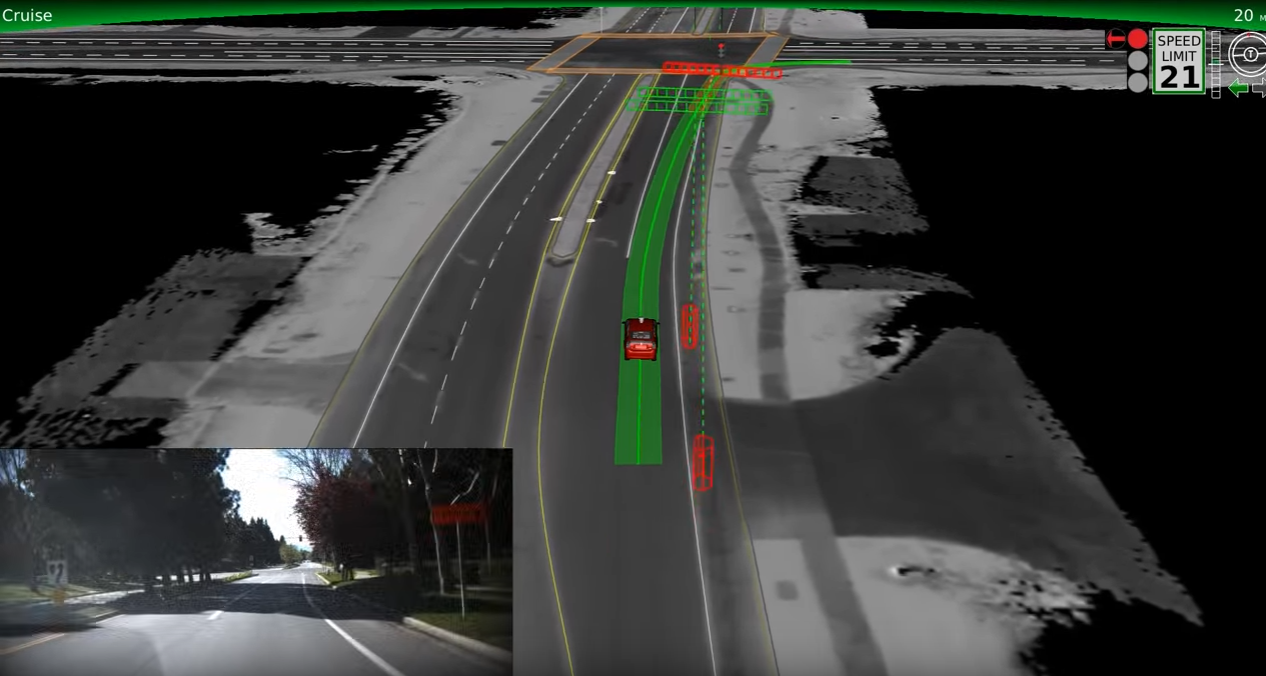
Environment modeling
- other cars
- pedestrians
- cyclists
- crossroads
- traffic lights
- street signs
- children & animals
- railroad crossings
- construction works
- local driving rules
- emergency vehicles
- driving schools
Odometry
Odometry is the use of data from motion sensors to estimate change in position over time.
Predicting traffic
- Avoid collision paths
- Avoid blind spots
- The humans do not have 360° view and use mirrors instead
- Goals of other traffic participants
- Anticipate trajectories of others
- Predict sudden changes of direction
- Prospect Theory - taking risks
Driving strategies
Defensive driving
- Avoid blind spot
- Keep distance from other cars
- Anticipate sudden changes of direction
- Pedestrians or animals entering the road
- children near playgrounds
- animals in a forest at night
Damage control
- stop to avoid secondary collisions
- break to minimize impact velocity
- steer the car to collide
- sides are most vulnerable
Feel natural to the passenger
- The passenger must feel comfortable
- Be predictable
- Try to drive like a human would
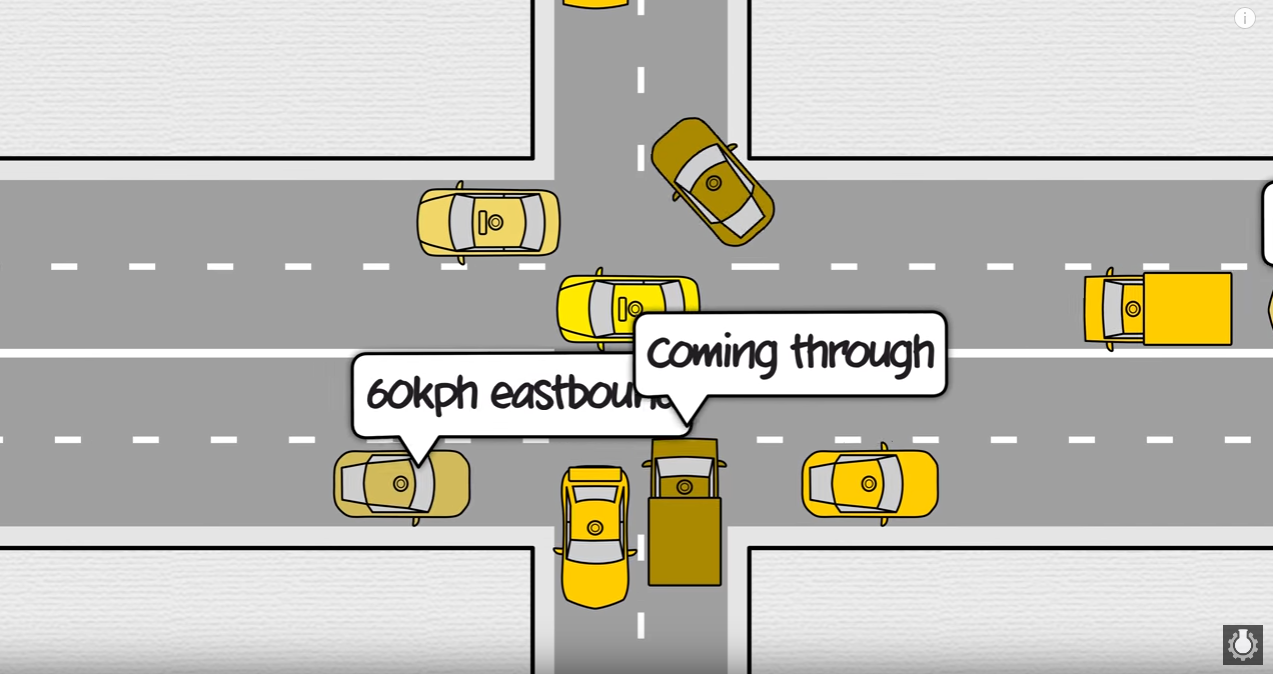
Talk to others
- Automated cars can talk to each other
- Cars can know exactly where others will go and not only predict their paths
- Coordinated
- Sharing environment data
- car can see further
- not having to stop at the crossroads
Law and Ethics
Autonomous cars
on public roads
- Nevada (2011)
- testing on public roads - Google
- United Kingdom (2013)
- France (2014)
- California
- completely driverless cars in 2018 (not yet passed)
Can you make the car break the rules?
- Speeding
- Parking at forbidden places
- Going past "No entry" sign
- "Do not use EET" button on new Czech cash registers...
Loss of jobs
- Taxi drivers
- Truck drivers
- Bus drivers
- Not a new (ethical) problem
- discussion about basic income
- "electronic persons" - should pay social security and health insurance
Increasing mileage
- "Send your car to go shopping and then find itself a parking spot where it would wait until you need it."
- More traffic
- More pollution
Who would be responsible for a car accident?
- The driver (who was asleep at the moment)?
- The automaker?
- manufacturers can already be held responsible for safety defects in the cars - e. g. Ford Pinto in
- The human driver in the other car?
The trolley problem
- philosopher Philippa Foot - 1967
- several scenarios
- two tracks
- fat man
- fat villain
- looping
Objections to the TP
- Even humans cannot choose the right answer
- The AI does not have the full information at the moment of taking the decision
- age, gender, number of children, ...
- There is no correct answer => the AI cannot chose the right answer
- AI does not have to make the correct decision, but rather not the wrong decision
- Low probability of such situation
Questions
Sources
- Google Self driving car
- https://www.google.com/selfdrivingcar
- Autonomous Vehicle Implementation Predictions
- Todd Litman, Victoria Transport Policy Institute
- http://www.vtpi.org/avip.pdf
-
National Highway Traffic Safety Administration
- http://www.nhtsa.gov/Research/Crash-Avoidance/Automated-Vehicles
Sources
- The Simple Solution to Traffic
- CP Grey - Youtube channel
- https://www.youtube.com/watch?v=iHzzSao6ypE&t=8s
- Responsibility for Crashes of Autonomous Vehicles: An Ethical Analysis
- Hevelke A, Nida-Rümelin J (2015) Science & Engineering Ethics, 21:619–630
- Ludwig-Maximilians-Universität München